- 销售与服务热线
- 400 886 9608
混合动力系统架构-
一、混动系统模式切换原则与SOC控制概述
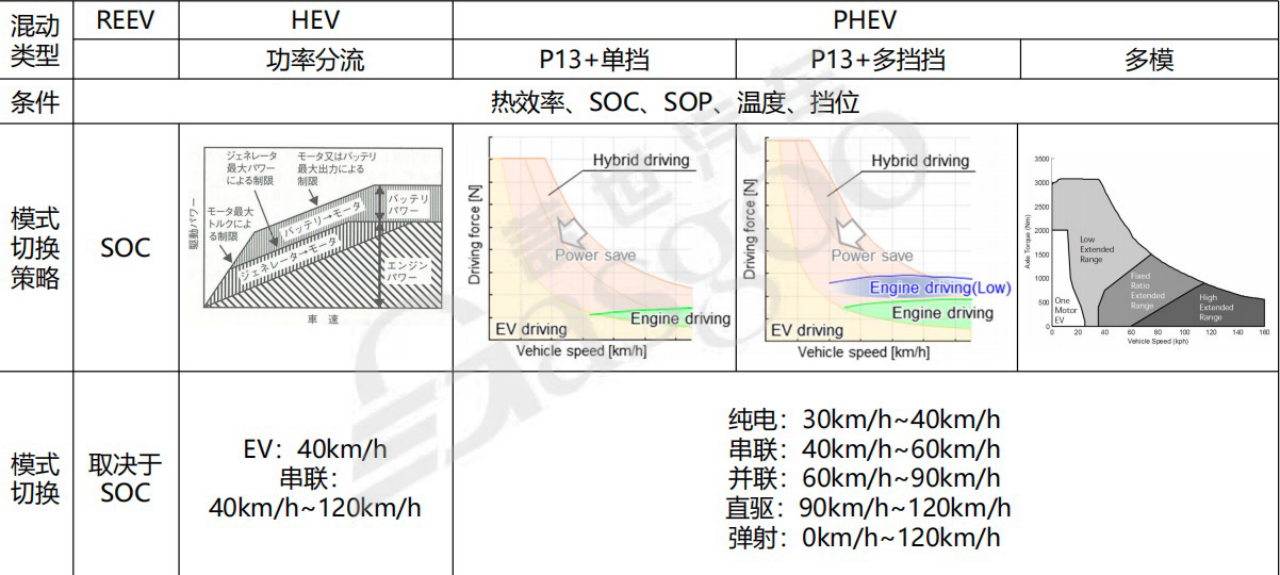
混合动力系统主要包含REEV(增程式电动)、HEV(混合动力汽车)、PHEV(插电式混合动力汽车)等类型,其模式切换依据热效率、SOC(荷电状态)、SOP(标准操作程序)、温度以及挡位等条件进行。例如,在车速方面,纯电模式一般运行于30 - 40km/h;串联模式在40 - 60km/h;并联模式为60 - 90km/h;直驱模式处于90 - 120km/h 。不同模式下,SOC的控制策略对混动系统的性能有着关键影响。
二、混动系统的运行模式及SOC控制策略
(一)纯电运行模式
纯电运行模式下,发动机停止工作,车辆动力完全由电池包提供。近年来,随着电混技术的发展,这种模式受到更多关注。与纯电车相比,混动系统虽电池和发动机尺寸更大,但功能更为丰富。
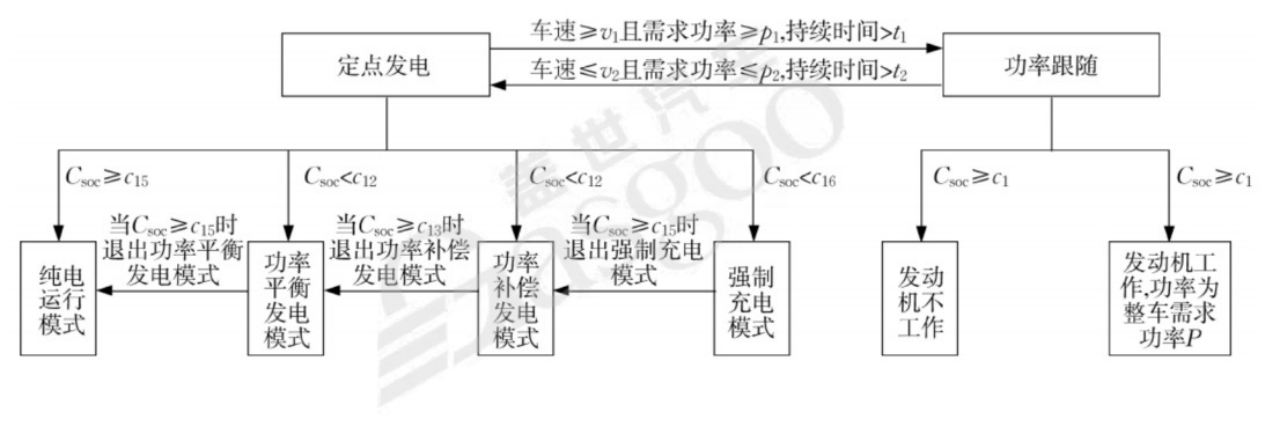
(二)功率平衡发电模式
当电池电量较高时,发动机以较小功率发电,维持电池电量在一定范围,确保系统稳定运行。
(三)功率补偿发电模式
在电池电量较低的情况下,发动机提高发电功率,以补充电量。此时发动机转速会相应提高,但为控制NVH(噪声、振动与声振粗糙度)性能及保证功率稳定输出,其转速通常不会超过3000转。
(四)强制充电模式
当电池电量极低,如车辆长时间未运行或在露营等用电量大的场景下,发动机提供全部发电功率,快速提升电池电量。此模式下,为保证发动机能够正常启动,需设定合理的SOC最低阈值。在实际应用中,还需考虑电池电量显示误差以及环境温度等因素对电池性能的影响。
三、SOC控制核心要点
(一)功率跟随策略下的发电优化
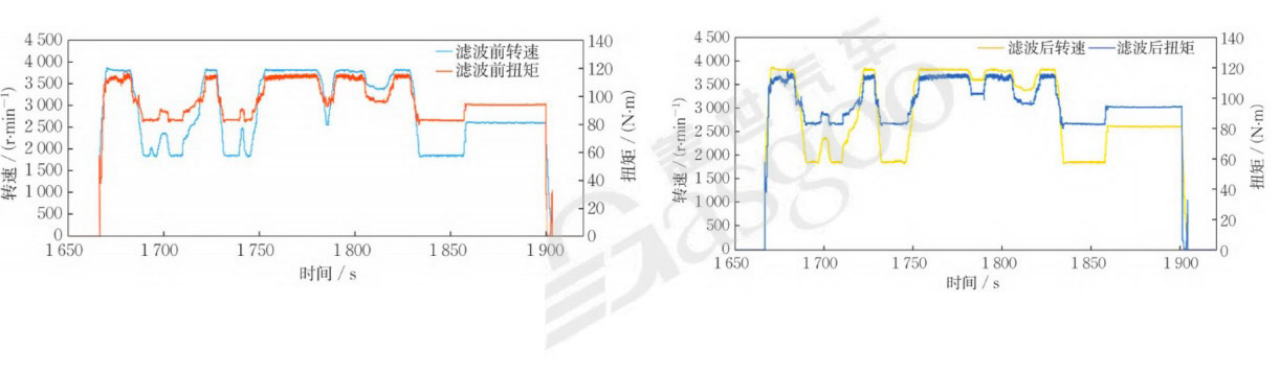
在功率跟随策略中,整车需求功率直接决定发动机运行功率。然而,频繁变化的油门会使发动机工况剧烈波动,导致油耗增加和排放变差,如在WLTC测试循环中,扭矩急剧变化就会出现此类问题。为解决这一问题,可采用延迟响应策略,即发电功率响应需求功率时设置可标定的延迟时间。当短时间内需求功率突变后又恢复原始值时,发电功率可忽略此次变化,维持在稳定发电功率点,从而优化发电过程,提升系统性能。
(二)定点发电策略下的NVH优化
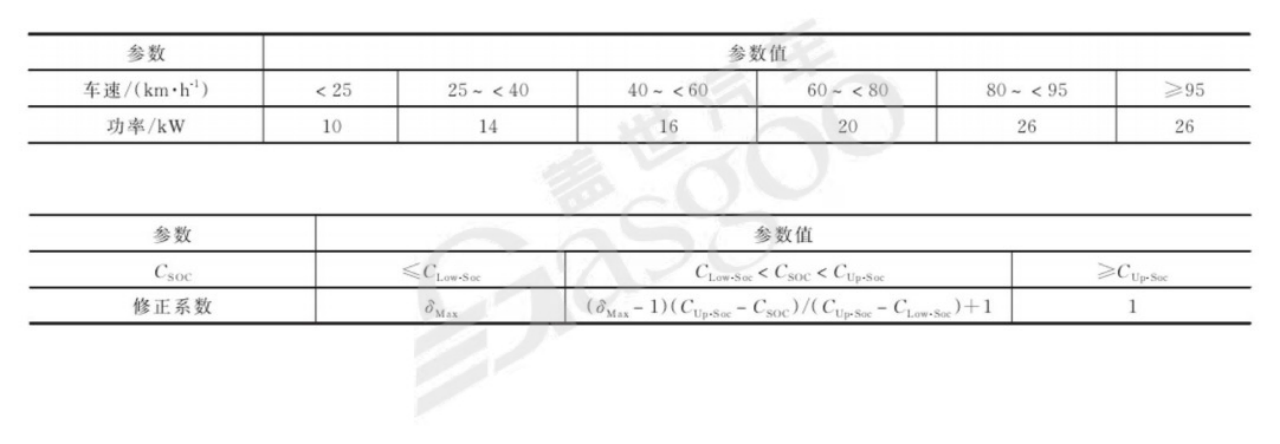
为兼顾NVH性能与电池电量,定点发电策略开发了基于车速的功率限制功能以及基于SOC的功率限制系数修正。根据车速限制发电功率,车速越低,功率越低,这有助于降低整车噪声水平。通过大量测试得出不同车速段对应的功率值以及SOC修正系数等经验值,以优化定点发电策略,提升车辆整体性能。
(三)能量回馈时的发电功率优化
当电池的SOC和温度确定时,电池的最大允许充电功率固定。在能量回馈过程中,增程器发电功率与回馈功率之和不能超过该最大值,否则会引发电池故障。当增程器发电时有大能量回馈,需降低增程器发电功率;回馈结束后,再恢复发电功率。为保证能量回馈过程的稳定性以及NVH性能,当回馈功率大于设定值时,发电功率为电池允许充电功率与回馈功率之差,同时确保发动机转速和扭矩的稳定。
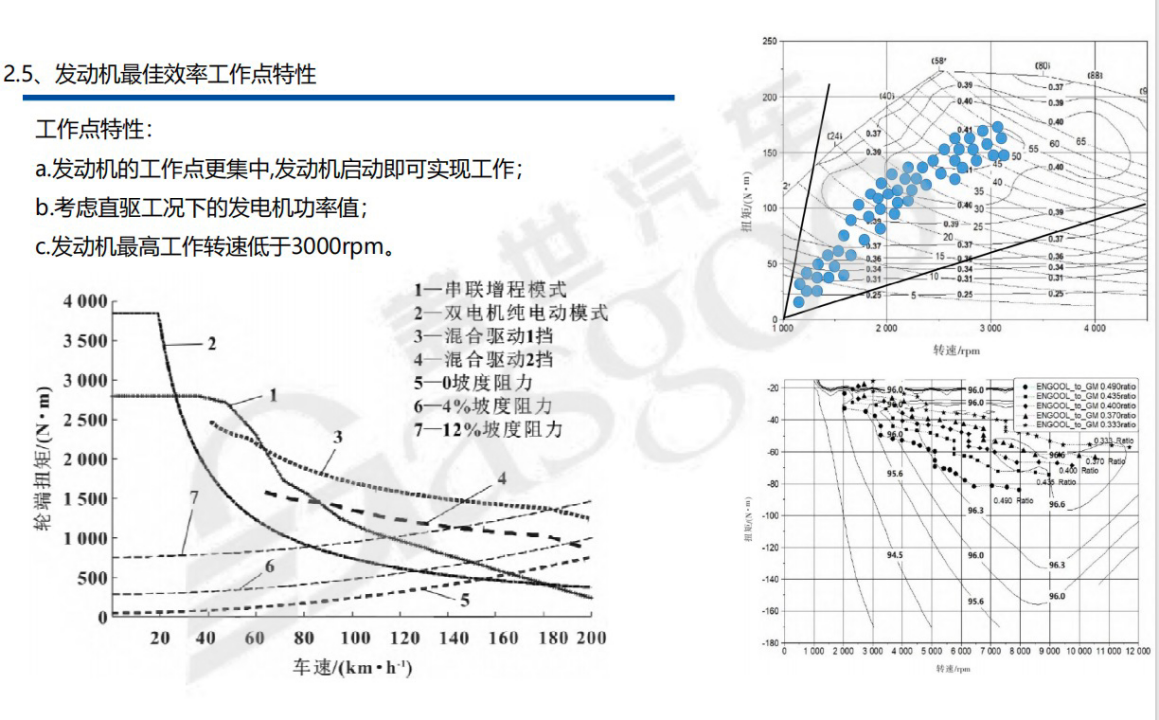
四、发动机最佳效率工作点特性
发动机在混动系统中存在最佳效率工作区域。其工作点更为集中,启动后能迅速进入工作状态。在设计和运行时,需考虑直驱工况下的发电机功率值,同时发动机最高工作转速一般低于3000rpm,以控制噪声和保证系统稳定性。不同混动模式(如串联增程、双电机纯电动、混合驱动等)以及不同坡度阻力下,发动机的工作特性有所差异。目前,乘用车发动机热效率较高,部分可达41%左右,最高官方公开值为46.1%,但成本较高。主流1.5T涡轮增压发动机在动力性上优于1.5L自吸发动机,电机、MCU(电机控制单元)等部件也有较高的效率表现,整体系统能达到双95(电机效率、MCU效率及传动系统效率折合后综合指标)的行业规范。
1、 Overview of Mode Switching Principles and SOC Control in Hybrid Systems
The hybrid system mainly includes types such as REEV (Extended Range Electric), HEV (Hybrid Electric Vehicle), PHEV (Plug in Hybrid Electric Vehicle), etc. Its mode switching is based on thermal efficiency, SOC (State of Charge), SOP (Standard Operating Procedure), temperature, and gear conditions. For example, in terms of vehicle speed, pure electric mode generally operates at 30-40 km/h; The series mode is between 40-60km/h; Parallel mode is 60-90km/h; The direct drive mode is between 90-120km/h. The control strategy of SOC has a critical impact on the performance of hybrid systems in different modes.
Hybrid System Architecture - Part 2 | Introduction to the Hybrid System Series at Gaishi University
2、 Operation mode and SOC control strategy of hybrid system
(1) Pure electric operation mode
In pure electric operation mode, the engine stops working and the vehicle's power is completely provided by the battery pack. In recent years, with the development of hybrid technology, this mode has received more attention. Compared with pure electric vehicles, hybrid systems have larger battery and engine sizes, but richer functions.
Hybrid System Architecture - Part 2 | Introduction to the Hybrid System Series at Gaishi University
(2) Power balance generation mode
When the battery level is high, the engine generates electricity at a lower power to maintain the battery level within a certain range and ensure stable system operation.
(3) Power compensation generation mode
When the battery level is low, the engine increases its power generation to replenish the battery. At this point, the engine speed will increase accordingly, but in order to control NVH (noise, vibration, and acoustic roughness) performance and ensure stable power output, its speed usually does not exceed 3000 revolutions per minute.
(4) Forced charging mode
When the battery level is extremely low, such as when the vehicle has not been running for a long time or in scenarios with high electricity consumption such as camping, the engine provides all the generated power to quickly increase the battery level. In this mode, to ensure that the engine can start normally, a reasonable minimum SOC threshold needs to be set. In practical applications, it is also necessary to consider the impact of battery level display errors and environmental temperature on battery performance.
3、 Core Points of SOC Control
(1) Power generation optimization under power following strategy
In the power following strategy, the required power of the entire vehicle directly determines the operating power of the engine. However, frequent changes in throttle can cause severe fluctuations in engine operating conditions, leading to increased fuel consumption and poorer emissions, such as in the WLTC test cycle where torque changes sharply. To solve this problem, a delay response strategy can be adopted, which sets a calibratable delay time when the generated power responds to the demand power. When the demand power suddenly changes and then returns to its original value in a short period of time, the power generation can ignore this change and maintain a stable power generation point, thereby optimizing the power generation process and improving system performance.
Hybrid System Architecture - Part 2 | Introduction to the Hybrid System Series at Gaishi University
(2) NVH optimization under fixed-point power generation strategy
To balance NVH performance and battery capacity, the fixed-point power generation strategy has developed a power limit function based on vehicle speed and a power limit coefficient correction based on SOC. According to the speed limit, the power generation is reduced as the vehicle speed decreases, which helps to lower the overall noise level of the vehicle. Through extensive testing, empirical values such as power values and SOC correction coefficients corresponding to different vehicle speed ranges are obtained to optimize fixed-point power generation strategies and improve overall vehicle performance.
Hybrid System Architecture - Part 2 | Introduction to the Hybrid System Series at Gaishi University
(3) Optimization of power generation during energy feedback
When the SOC and temperature of the battery are determined, the maximum allowable charging power of the battery is fixed. In the process of energy feedback, the sum of the power generated by the range extender and the feedback power cannot exceed the maximum value, otherwise it will cause battery failure. When the range extender generates electricity, there is a large amount of energy feedback, and the power generated by the range extender needs to be reduced; After the feedback is completed, restore the power generation. To ensure the stability of the energy feedback process and NVH performance, when the feedback power is greater than the set value, the generated power is the difference between the allowable charging power of the battery and the feedback power, while ensuring the stability of the engine speed and torque.
4、 Characteristics of the optimal efficiency operating point of the engine
The engine has an optimal efficiency operating range in the hybrid system. Its working points are more concentrated, and it can quickly enter the working state after startup. When designing and operating, it is necessary to consider the power value of the generator under direct drive conditions, and the maximum operating speed of the engine is generally below 3000rpm to control noise and ensure system stability. The working characteristics of the engine vary under different hybrid modes (such as series extended range, dual motor pure electric, hybrid drive, etc.) and different slope resistances. At present, the thermal efficiency of passenger car engines is relatively high, with some reaching around 41%, and the highest official public value is 46.1%, but the cost is relatively high. The mainstream 1.5T turbocharged engine outperforms the 1.5L naturally aspirated engine in terms of power performance, and components such as the motor and MCU (Motor Control Unit) also have high efficiency performance. The overall system can meet the industry standard of Double 95 (motor efficiency, MCU efficiency, and transmission system efficiency converted into comprehensive indicators).